





(一)、产品概述工业机器人实训平台,如图a、b 所示,以关节型六轴串联工业机器人为核心,在操作平台的四周合理分布有多种不同工艺应用的实训模块,包含了搬运码垛工艺、分拣工艺、抛光打磨工艺、装配工艺等工业
(一)、产品概述
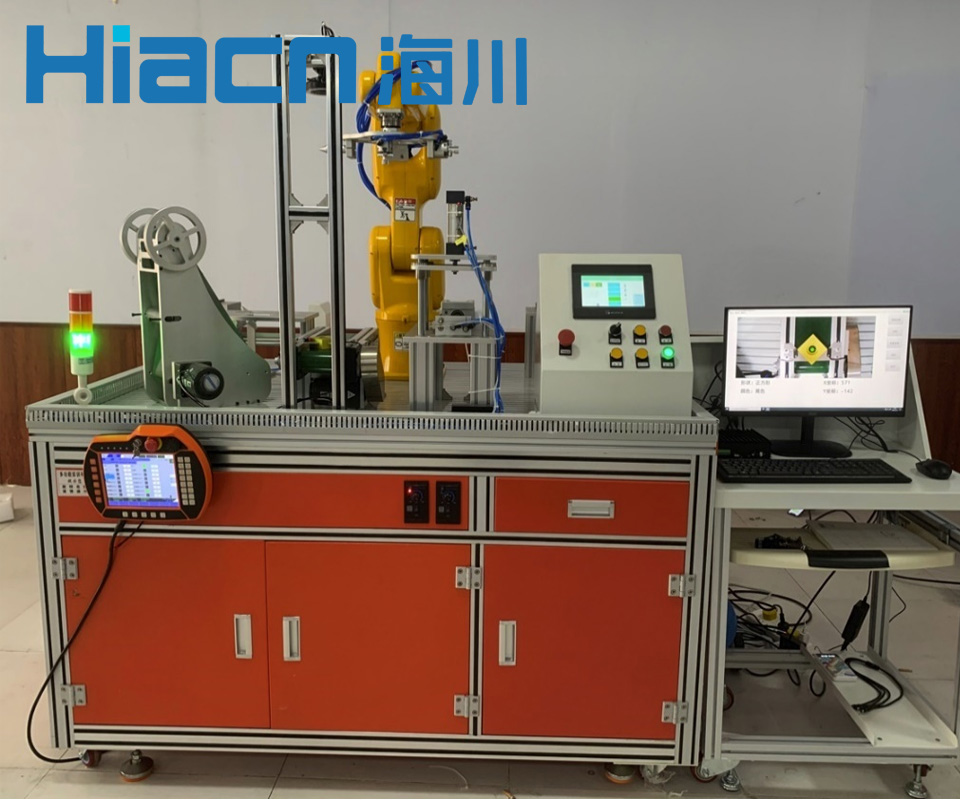
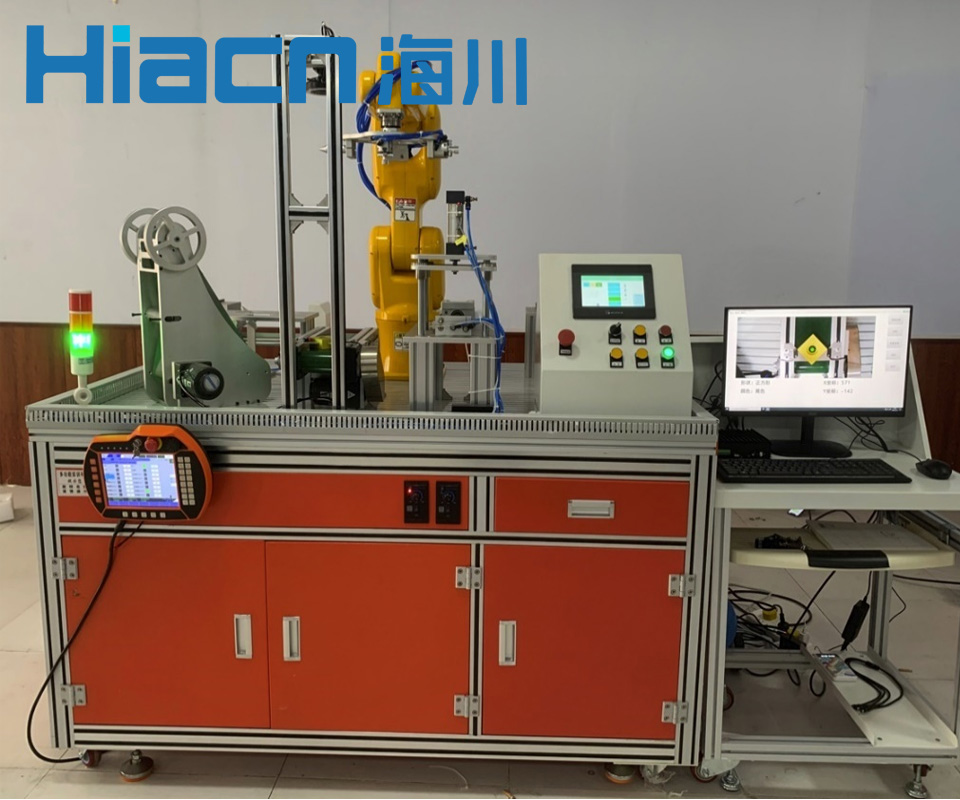
工业机器人实训平台,如图a、b 所示,以关节型六轴串联工业机器人为核心,在操作平台的四周合理分布有多种不同工艺应用的实训模块,包含了搬运码垛工艺、分拣工艺、抛光打磨工艺、装配工艺等工业机器人典型应用,不仅满足了职业院校不同专业学生针对工业机器人的操作和编程的教学需求,完全来源于工业应用现场的特征也使该工作站更加适合于作为职业技能竞赛平台。
图a
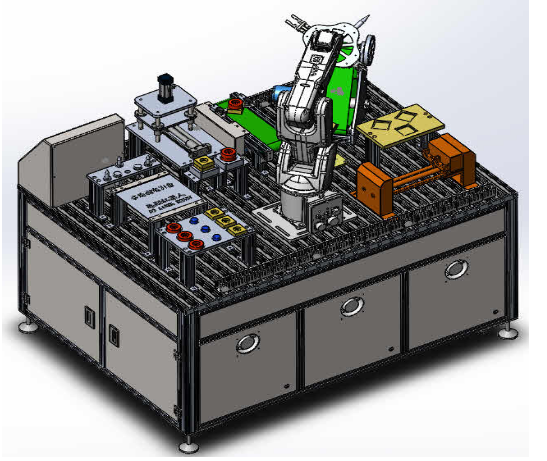
图b
工作站深度集成了离线编程技术,软件中不仅包含了与硬件平台的相符三维模型资源,还大大简化了涂胶及搬运码垛工艺实现的编程应用过程、提高轨迹复现精度、避免发生碰撞干涉。
1、产品组成
1.工业机器人1台;
2.完成产品输送、分拣、码垛,产品轨迹涂胶、TCP校点等工作;
3.组成:机器人模块、实训模块、控制模块等;
4.平台采用模块化设计,实训功能可自主搭配,能够完成工业机器人认知与操作,运行轨迹操纵,程序数据及设定等示教编程。
2、技术参数
1)六轴机器人标配:ABB IRB1200 6自由度工业机器人
2)外形尺寸:L1600mm×W1200mm×H2000mm
3)工作电源:220V±5% 50HZ
4)安全保护:漏电保护,过流保护,短路保护
5)环境温度:-10~50℃
6)相对温度:≤85%
7)整机重量:85kg
3、产品配置及功能
序号设备名称主要参数
1工业机器人机器人本体 (ABB、国产可选)
轴数:6轴
第6轴达到距离:700mm
称重能力: 6kg
重复定位精度:±0.02mm
防护等级:IP40
安装方式:落地式
机器人底座尺寸:190×190mm
本体质量:54kg
机器人本体到控制柜之间的电缆长度:不小于5m
上臂集成信号源:至少10路
上臂集成气源:最高5 bar
TCP最大速度:不小于7.1m/s
2主机架1600×1200×900mm工业铝型材搭建,钣金表面喷塑处理,带滚轮。
3操作面板模块操作面板上的元件:操作面板上的元件,电源指示灯,蜂鸣器等。
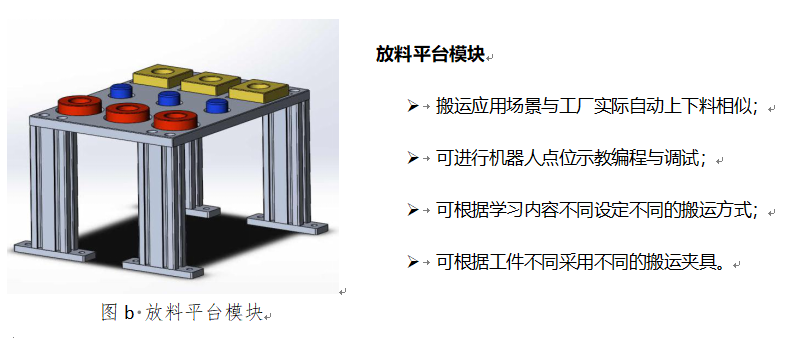
4放料平台模块实现物料搬运,九宫格分拣功能。
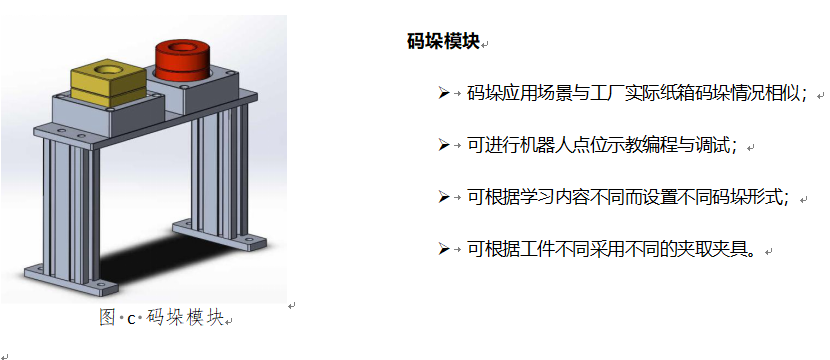
5码垛仓库模块由三层码垛平台组成,钣金喷塑,铝型材搭建。
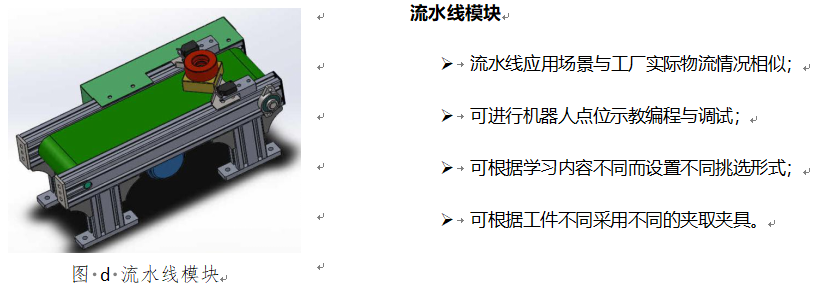
6流水线模块实现与输送物料自动化设备联动,实现自动搬运分类仓储等功能。
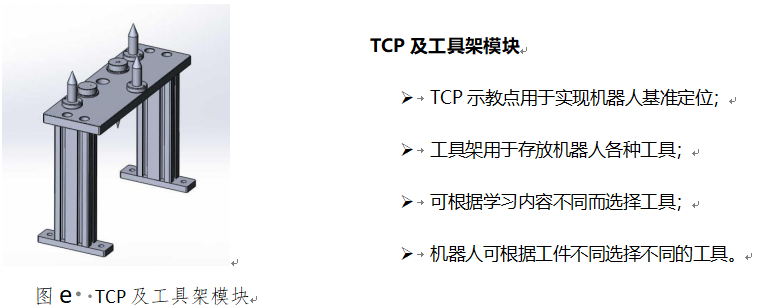
7TCP及工具架模块实现TCP工具存储,TCP点的校准等功能。
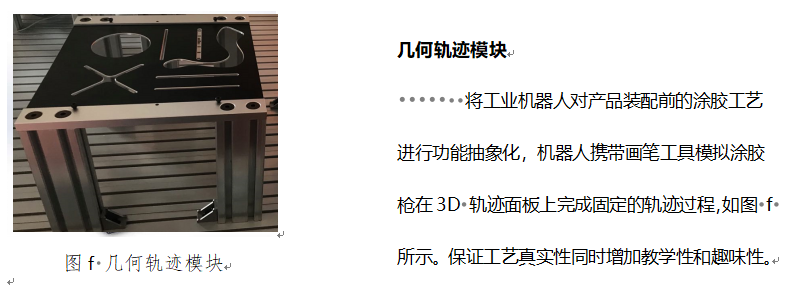
8几何轨迹模块(TCP练习区)A4纸大小,模板可按要求更换,模板上有矩形,三角形,圆,弧线灯,文字等轨迹。
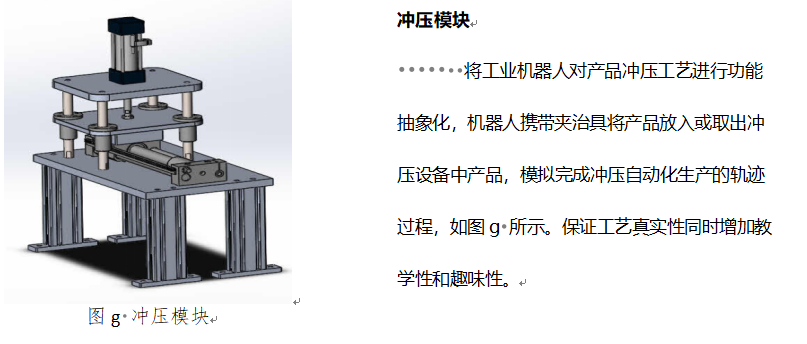
9冲压模块实现与冲压自动化设备联动,实现冲压设备自动搬运分类仓储等功能。
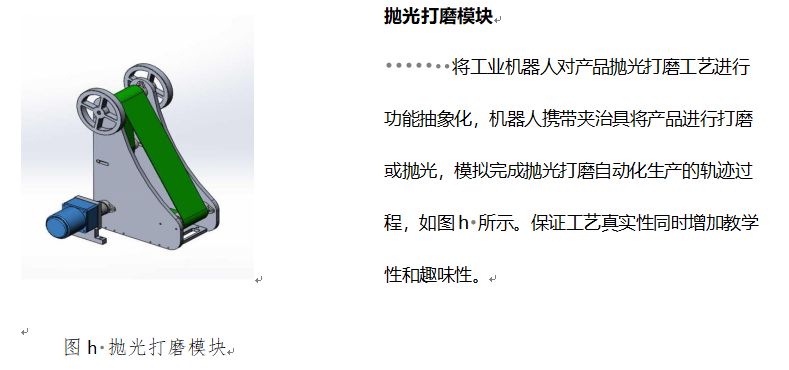
10抛光打磨模块模拟工厂比较通用的打磨砂轮 抛光砂轮 打磨皮带等打磨工艺。实现模拟打磨抛光等功能。
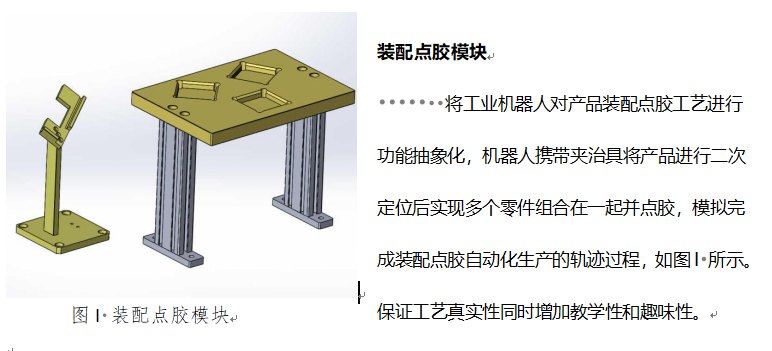
11装配点胶模块模拟工厂比较通用的二次定位轴孔装配,点胶等工艺。
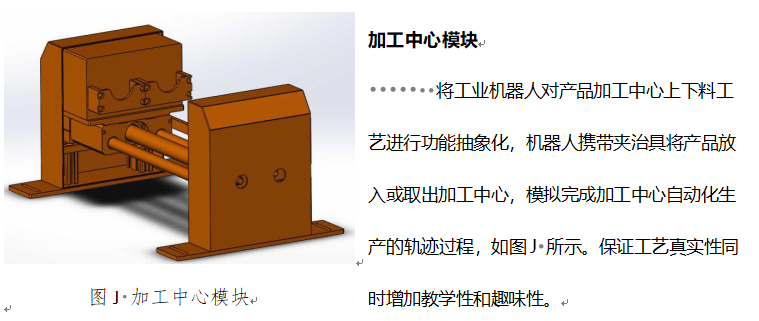
12加工中心模块模拟工厂比较通用的加工类设备上下料,上嵌件等工艺。
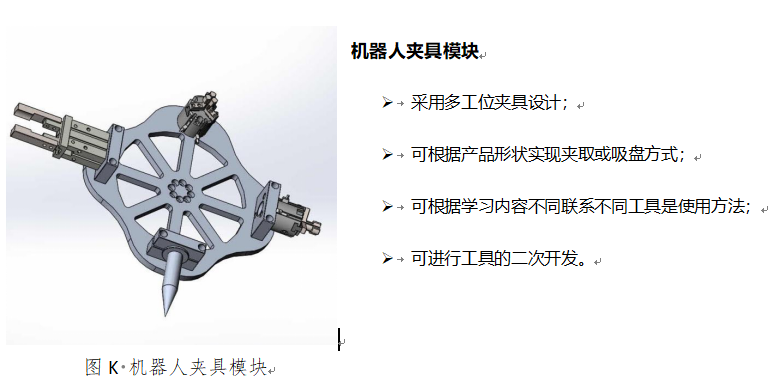
13机器人夹具模块实现物料吸取,TCP轨迹运行等功能。
4、实训模块介绍
二、工业机器人多功能实训工作站应用编程基础
(一)示教器
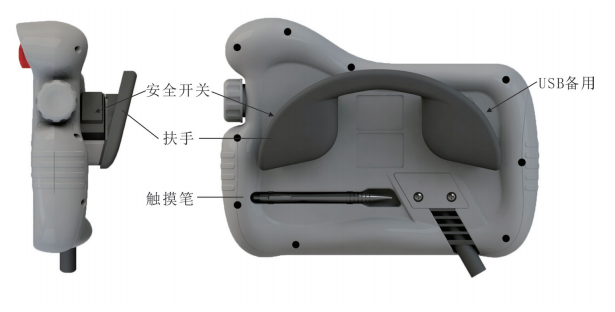
1、示教器外观及布局介绍
示教器上设有用于对机器人进行示教和编程所需的操作键和按钮。
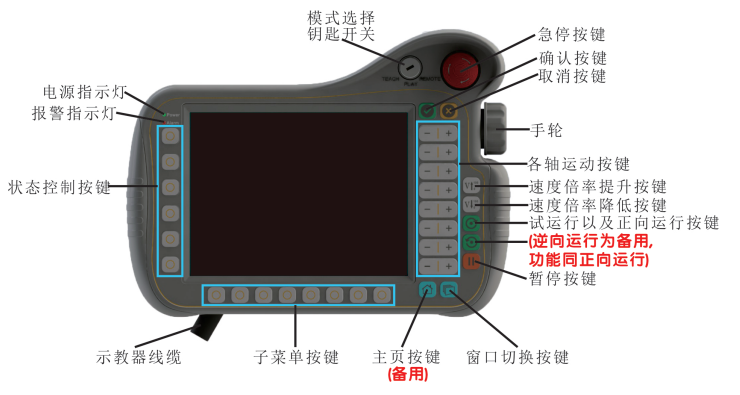
触摸屏示教器正面
三、实训功能
1、工业机器人的应用;
2、机电一体化系统的应用;
3、机器人电气设计和应用;
4、电机和传感器的技术和应用;
5、气动技术应用;
6、变频器的安装与调试;
7、触摸屏基本控制与设置;
8、可用于考核或技能竞赛,可考察职业能力;
9、工业机器人本体与控制器的安装接线。
10、工业机器人初始化与参数恢复;
11、工业机器人码垛应用接线;
12、工业机器人应用夹具选择与设计工业机器人码垛应用编程与调试;
13、工业机器人测系统数据交换的电气连接与调试技术;
14、工业机器人外围单元的电气连接与调试技术;
15、整机系统和监控系统的数据交换电气连接与调试;
16、工业机器人编程调试和应用;
17、工业机器人描图操作模块系统的调试;
18、工业机器人模拟仓库出入库系统的调试;
19、工业机器人工件装配模块系统的调试;
20、工业机器人多模块系统的组合与编程应用。
上一篇:工业机器人综合应用实训系统
下一篇:工业机器人焊接实训装置

请加微信











